

解决方案
多点定位MLAT系统解决方案
一、 多点定位MLAT系统介绍
1.1 什么是多点定位系统
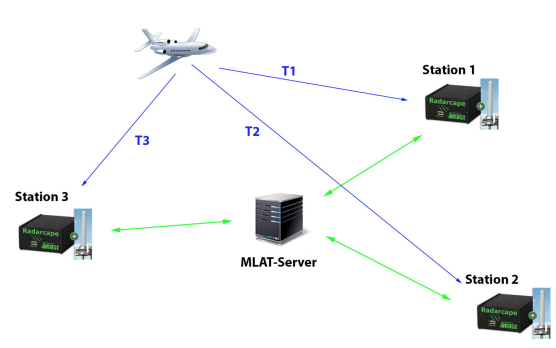
多点定位系统MLAT(Multilateration),利用多个地面接收机接收到机载应答机信号的时间差,计算得出飞机位置。机载应答机在T0发出信号,由于飞机距地面多个地面接收机的距离不同,会导致多个地面接收机接收到应答机信号的时间也不同,接收机1/2/3/4接收到信号的时间分别为T1/T2/T3/T4,这就表示,飞机到接收机1/2/3/4的距离分别为(T1-T0)*C(光速),(T2-T0)*C,(T3-T0)*C,(T4-T0)*C,利用飞机到不同接收机之间的距离差,就可以计算出飞机的位置了。
1.2 为什么需要多点定位系统
传统雷达造价高、安装和维护复杂,于是航空领域出现了ADS-B,但ADS-B要求机载设备必须具备ADS-B发射功能,而且通航飞机加装ADS-B的比例更低,这就导致ADS-B地面接收机监视到加装了ADS-B的飞机,而多点定位系统要求飞机加装了应答机即可。
1.3 多点定位系统架构
安装3到5台RadarCape,在一台服务器上安装多点定位中央处理系统软件,通过以太网、移动网络或互联网将RadarCape与中央 MLAT服务器连接,即可搭建完成一套多点定位系统。
二、 数据接口
可以从RadarCape获得多点定位系统解算后的定位数据,数据接口为JSON或TCP/UDP端口30003,也可以通过网页形式浏览MLAT数据。
三、 航迹显示
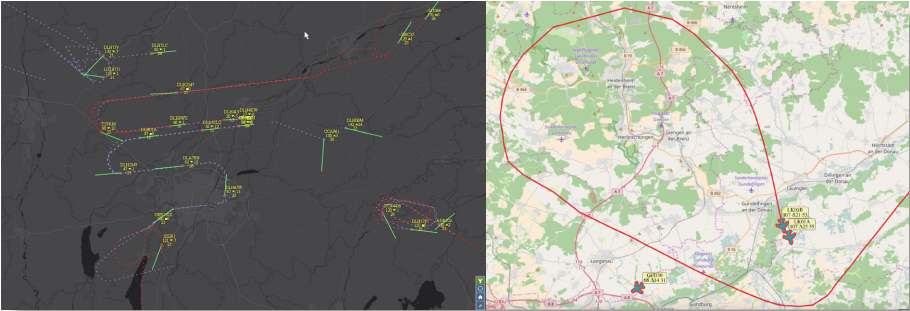
可通过RadarCape自带的航迹显示界面,观察MLAT定位的飞机航迹信息,如下为部分系统示例。
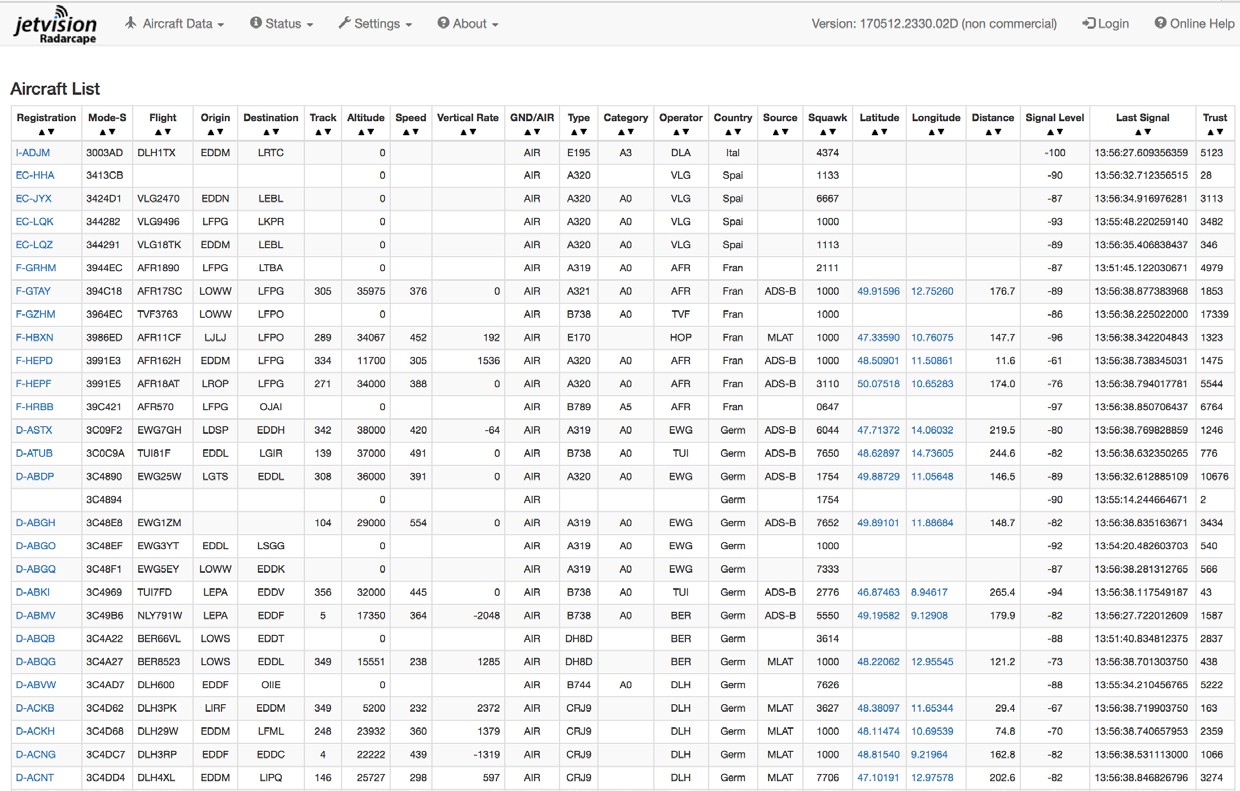
各飞机信息列表
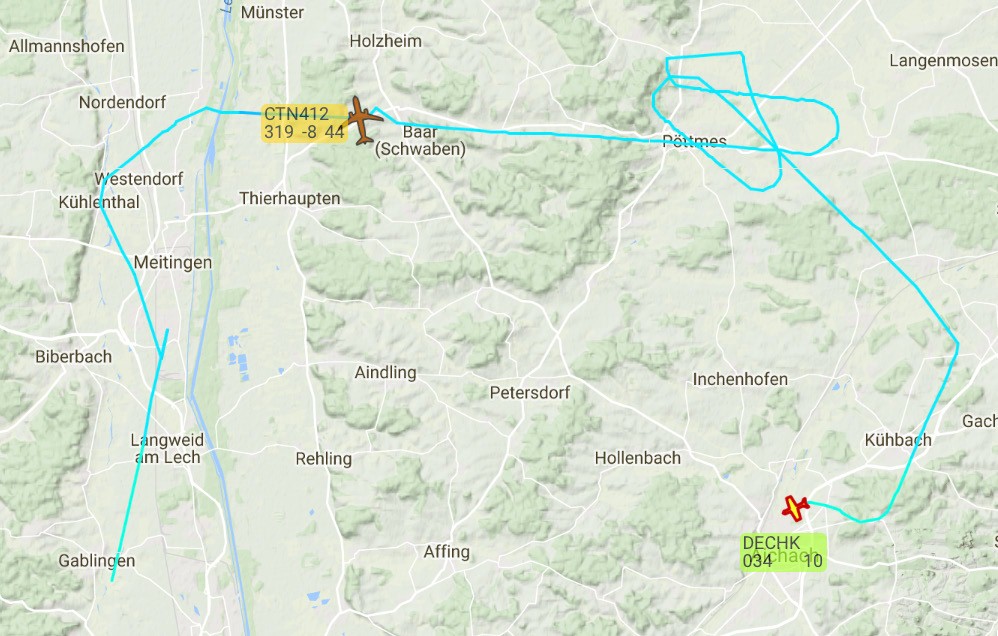
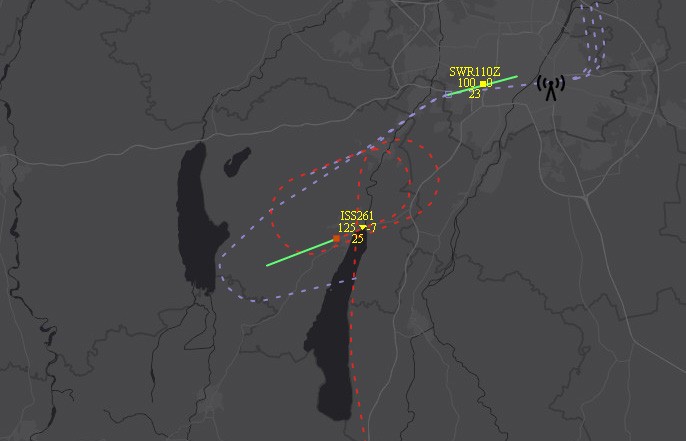
小型飞机(如Cessna)进行飞行训练
1.1 什么是多点定位系统
多点定位系统MLAT(Multilateration),利用多个地面接收机接收到机载应答机信号的时间差,计算得出飞机位置。机载应答机在T0发出信号,由于飞机距地面多个地面接收机的距离不同,会导致多个地面接收机接收到应答机信号的时间也不同,接收机1/2/3/4接收到信号的时间分别为T1/T2/T3/T4,这就表示,飞机到接收机1/2/3/4的距离分别为(T1-T0)*C(光速),(T2-T0)*C,(T3-T0)*C,(T4-T0)*C,利用飞机到不同接收机之间的距离差,就可以计算出飞机的位置了。
1.2 为什么需要多点定位系统
传统雷达造价高、安装和维护复杂,于是航空领域出现了ADS-B,但ADS-B要求机载设备必须具备ADS-B发射功能,而且通航飞机加装ADS-B的比例更低,这就导致ADS-B地面接收机监视到加装了ADS-B的飞机,而多点定位系统要求飞机加装了应答机即可。
1.3 多点定位系统架构
安装3到5台RadarCape,在一台服务器上安装多点定位中央处理系统软件,通过以太网、移动网络或互联网将RadarCape与中央 MLAT服务器连接,即可搭建完成一套多点定位系统。
二、 数据接口
可以从RadarCape获得多点定位系统解算后的定位数据,数据接口为JSON或TCP/UDP端口30003,也可以通过网页形式浏览MLAT数据。
三、 航迹显示
可通过RadarCape自带的航迹显示界面,观察MLAT定位的飞机航迹信息,如下为部分系统示例。
各飞机信息列表
小型飞机(如Cessna)进行飞行训练